Home Projekte
Spinne
Schnell aus Resten zusammengebastelt. Besteht aus zwei Servos und einem Cotrollerboard mit Atmega8. Durch ein kleines Bascom-Programm kann die Spinne vorwärts, links, rechts und rückwärts laufen. Sie ist sehr simpel und damit kostengünstig konstruiert.Ein Video folgt noch..
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
Nebelkammer
Hier ein Bild der Nebelkammer, im Kasten befindet sich die Wasserkühlung um die Wärme der Peltierelemente abzuführen. Der Wasseranschluss hierfür befindet sich auf der Rückseite. Die Temperatur der Peltierelemente kann über eine serielle Schnittstelle ausgelesen werden. Die Bodenplatte kühlt sich auf ca. -45°C ab.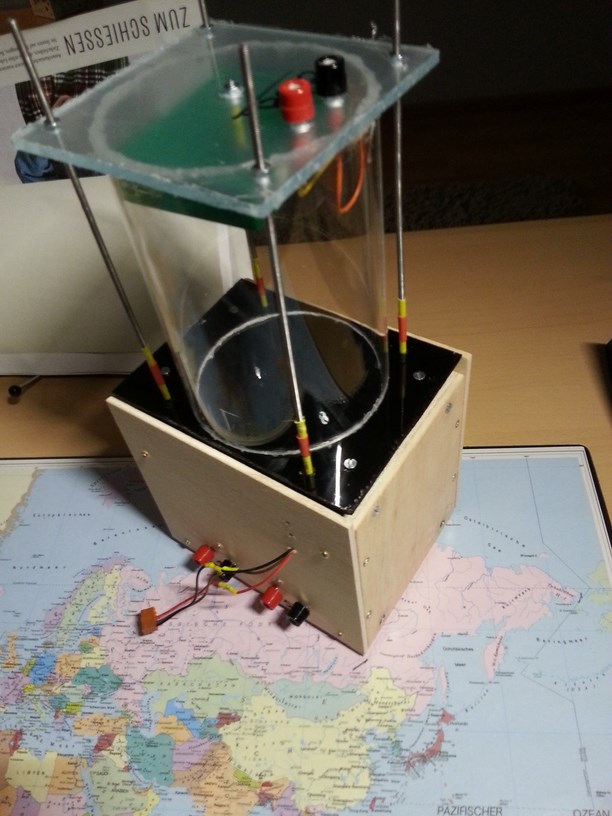
Hier ein paar Bilder der Spuren von Alpha (kurz und dick) bzw. Betateilchen (lang und dünn), welche in der Nebelkammer sichbar wurden:
.jpg)
.jpg)
.jpg)
.jpg)
Weitere Bilder und eine längere Beschreibung der Nebelkammer werden folgen, im Moment fehlt mir dazu leider die Zeit.
Aü1- zum Testen von Software gebaut ;)
Der AÜ-1 war sozusagen der "Testroboter" für verschiedene Software. Er wurde zur Kostenersparnis auschließlich aus gebrauchten Teilen aufgebaut. Er dient mir als Wissensbasis für spätere Projekte.
Gesteuert wurde er via EasyRadio am PC und optional über das Internet. Das PC Programm wurde in Visual Basic, die dazugehörige Websteuerung "WINT" in PHP programmiert.
Diese Programme werde ich später noch auf Extra-Seiten beschreiben.
Die Bildübertragung der 2 Kameras erfolgte über ein "CatCam" sende Modul. Der AÜ-1 hatte vier allradgetriebene Räder und eine Akkulaufzeit von ca. 2 Stunden bei voller Fahrt.
Das interne Controllerboard basierte auf einem Atmega32 Mainprozessor und einem Atmega8 für die Ansteuerung des Motortreibers.
Der Roboter hatte einen Temperatursensor an Board. Ansonsten konnte er noch die Akkuspannung messen.
Teile von ihm wurden noch für andere Test-Roboter verwendet.
Baubeginn: Oktober 2011
Fertigstellung: Irgendwann 2012
Sensoren: Temperatur, Spannung
CPU: Atmega32 und ATmega8
Akku: Nimh Racing Pack
Steuerung: Über PC oder Internet. Noch kein Autopilot.
